Research overview (only some of the directions):
|
|
|
Specific research directions & projects:
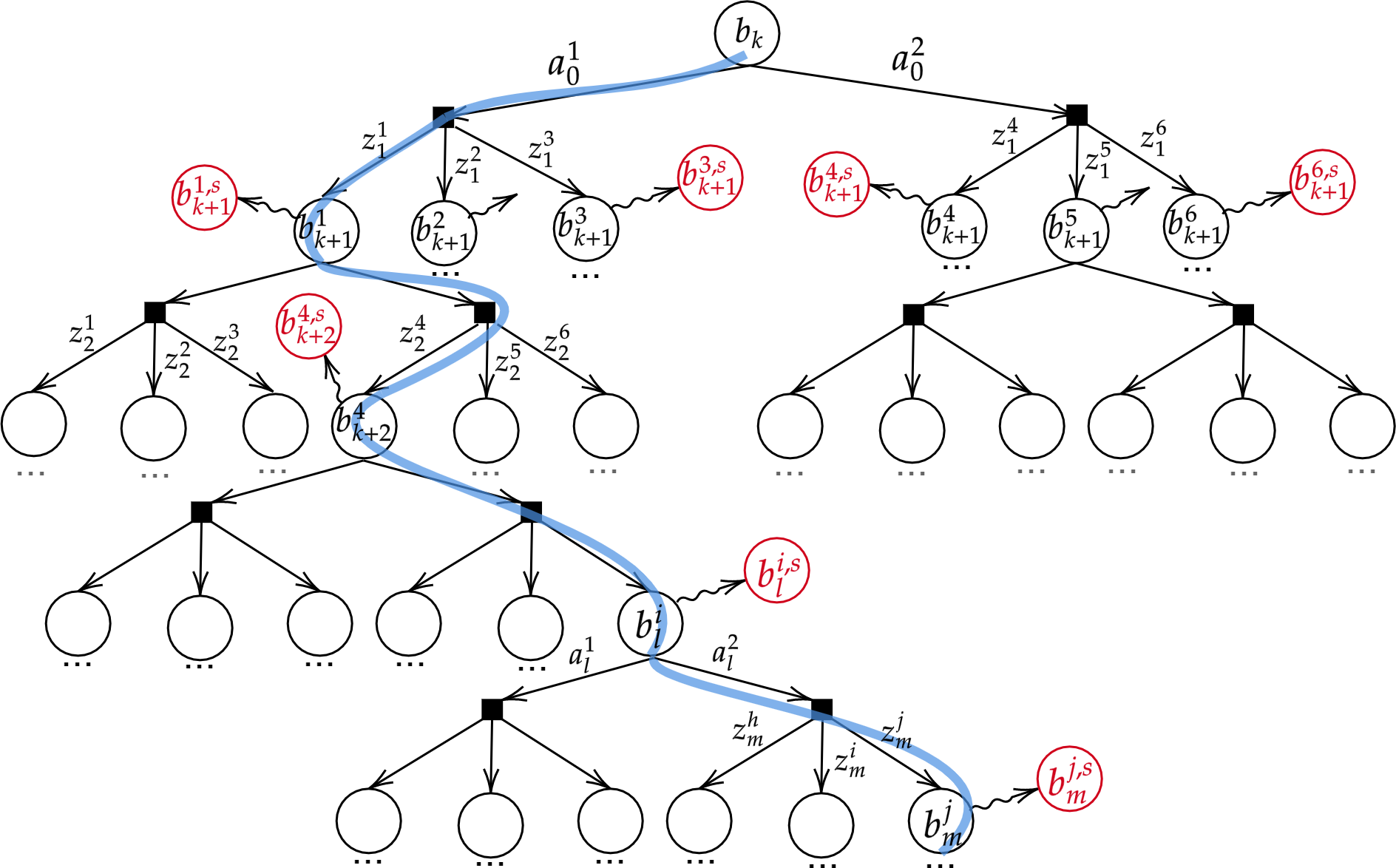 Simplification of Online Belief-Dependent Reward POMDP Planning |
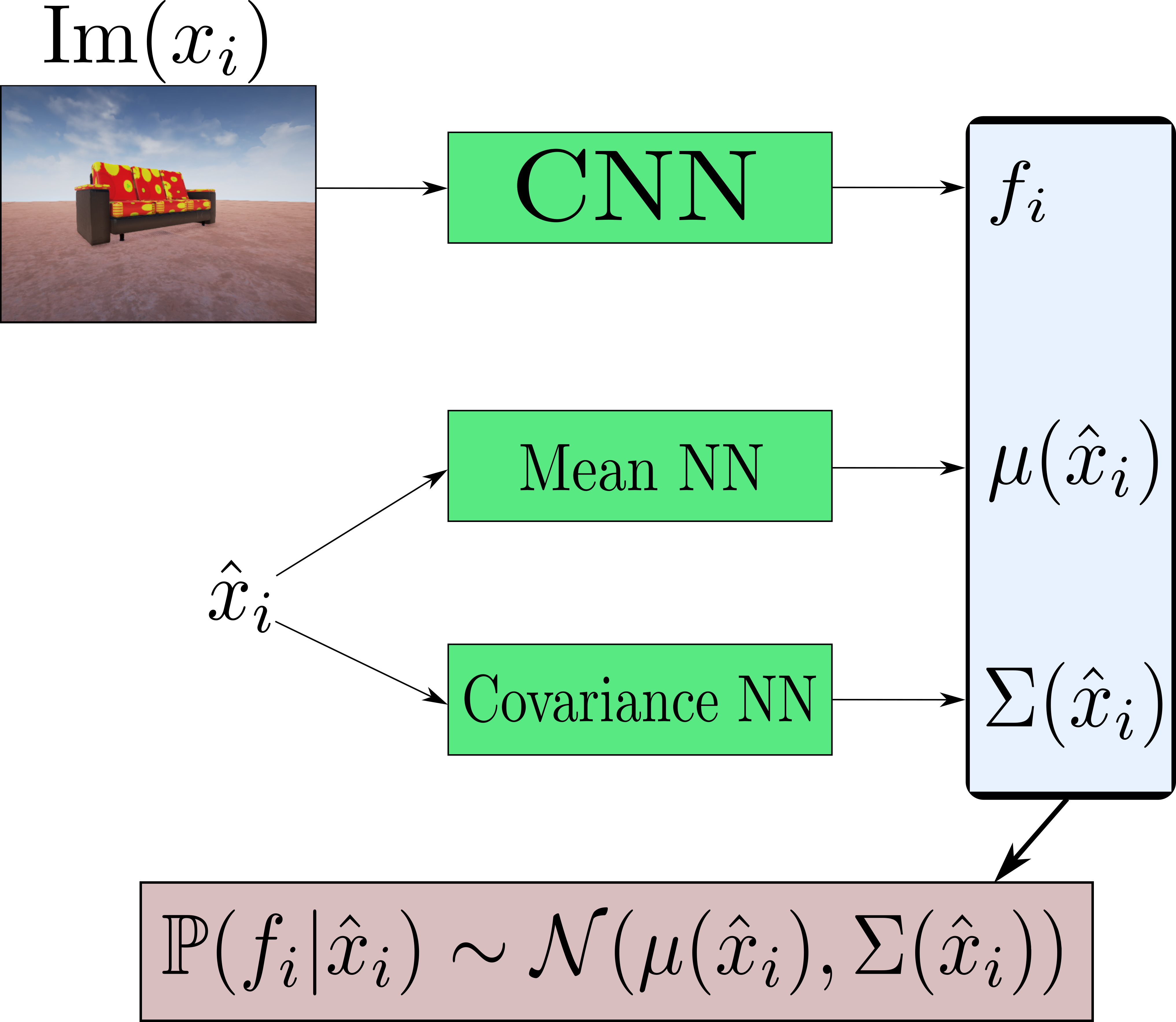 Probabilistic Inference via Deep Learning |
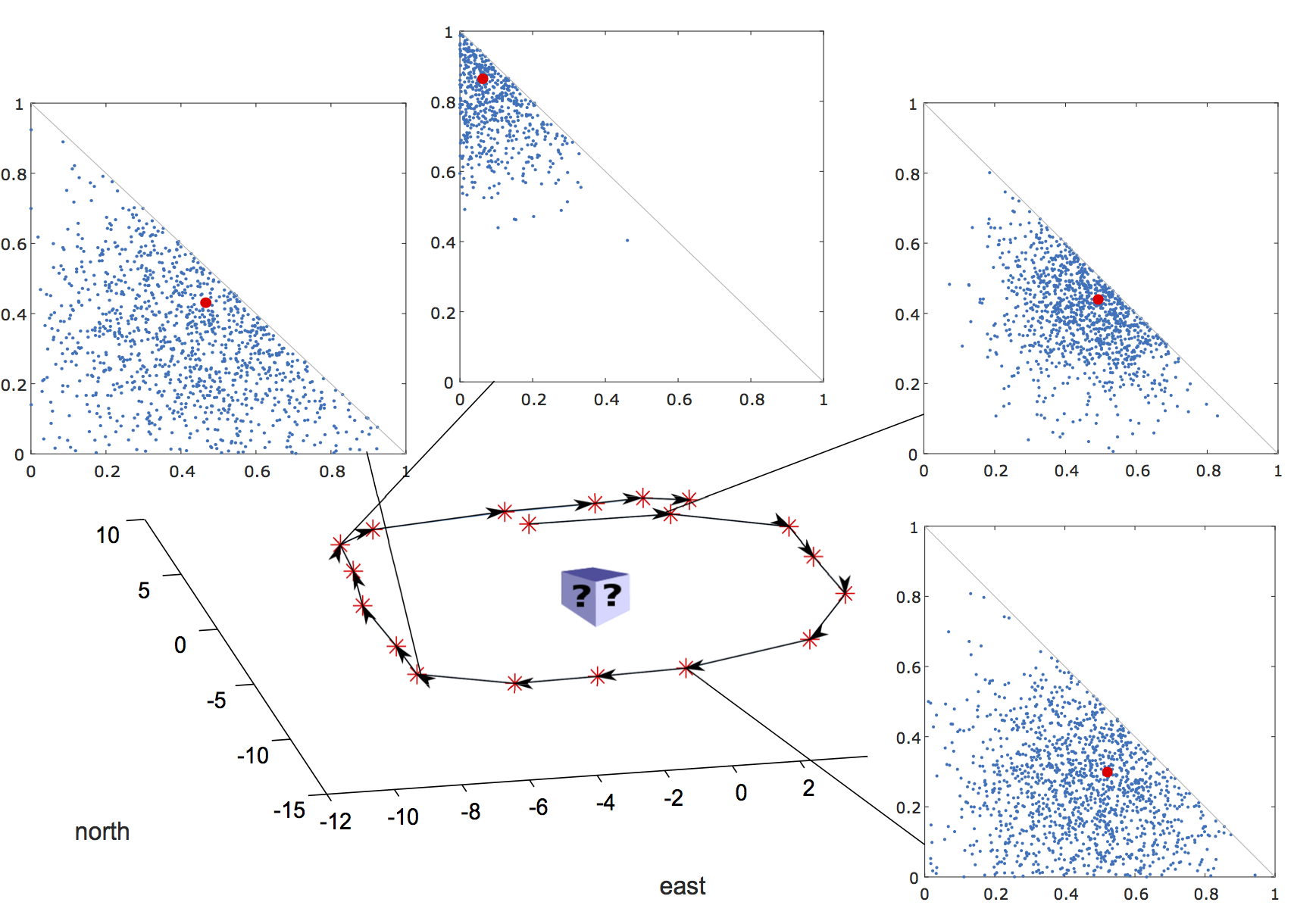 Autonomous Robust Semantic and Object-level Perception |
 Active Robust Perception via Belief Space Planning |
 Topological Belief Space Planning |
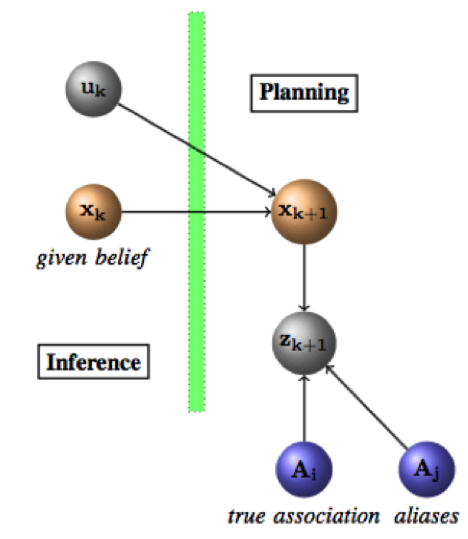
 Joint Inference and Incremental Belief Space Planning |
 Belief Space Planning via Factor Graphs and Re-use of Calculation |
 Sparsification for Decision Making in High-Dimensional State Spaces |
 Qualitative Perception, SLAM and Belief Space Planning |
 Planning in the Belief Space (Single and Multi-Robot) |
 Distributed Robust Inference and Data Association |
 Bundle Adjustment for SfM and Autonomous Navigation |
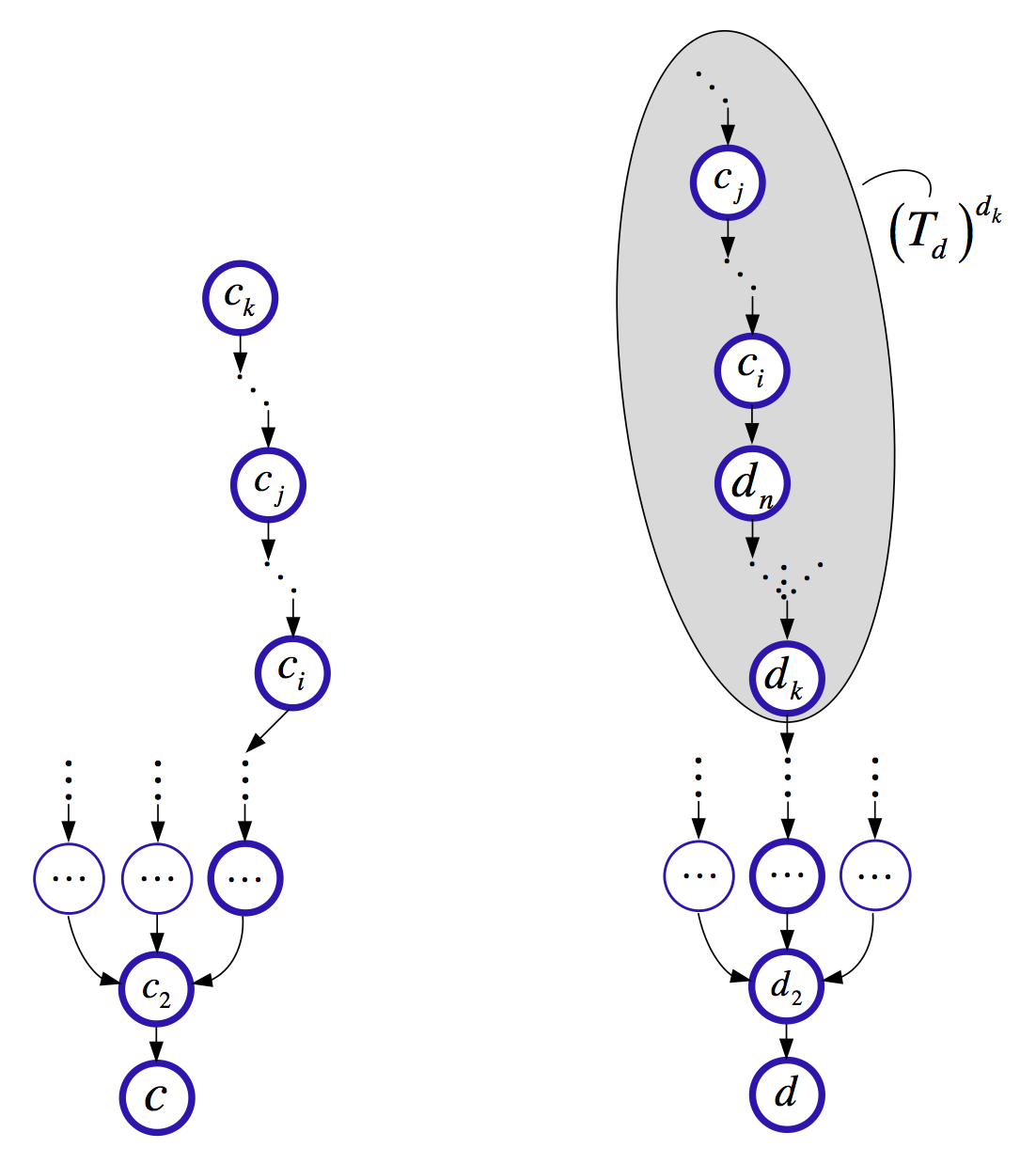
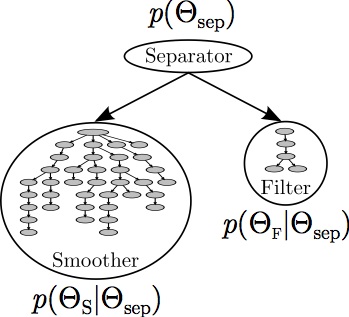 Factor Graph based Incremental Smoothing in Navigation Systems |
 Distributed Multi-Robot Cooperative Navigation |
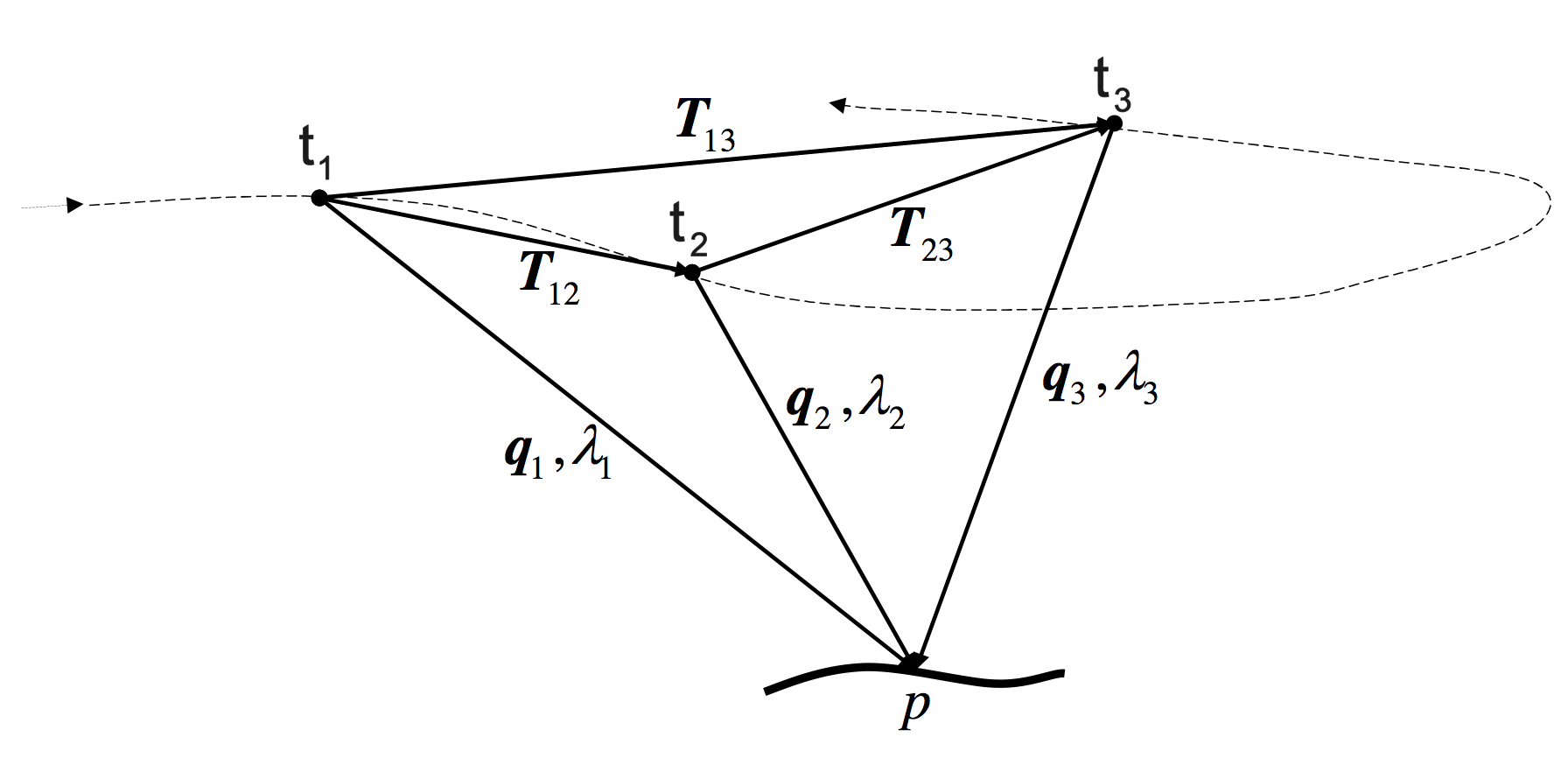 Three-View Geometry Constraints for Navigation-Aiding |
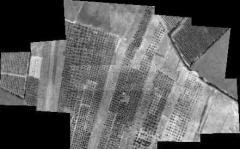 Online Mosaicking & Navigation-Aiding |