Inference and decision making under uncertainty are essential in numerous robotics problems. In recent years, the similarities between inference and control triggered much work, from developing unified computational frameworks to pondering about the duality between the two. In spite of the aforementioned efforts, inference and control, as well as inference and belief space planning (BSP) are still treated as two separate processes. We propose a novel approach that utilizes the similarities between inference and BSP and make the key observation that inference can be efficiently updated using the precursory planning stage, thus paving the way towards a joint inference and BSP paradigm.
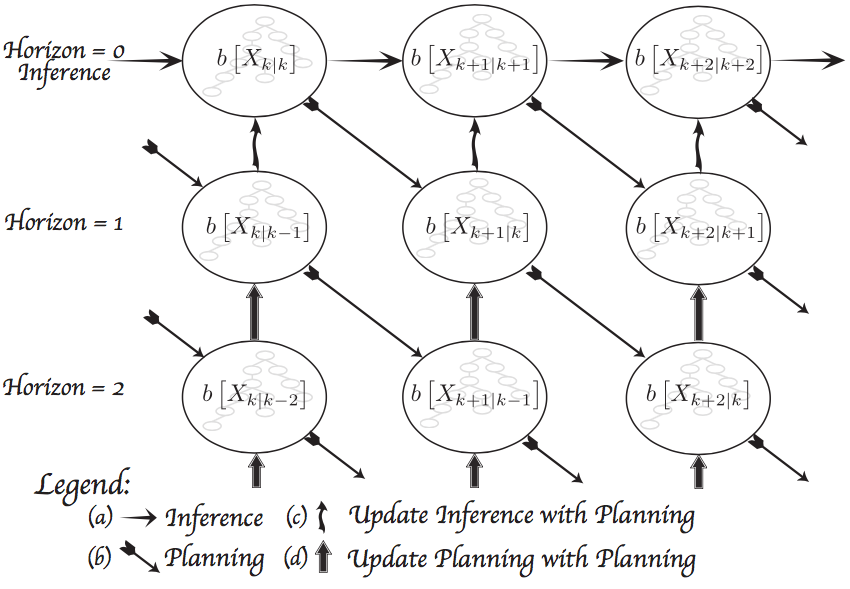
Updating inference with a precursory planning stage can be considered as a deviation from conventional Bayesian inference. Rather than updating the belief from the previous time instant with new incoming information (e.g. measurements), we propose to exploit the fact that similar calculations are already performed within planning in order to appropriately update the belief in inference by far more efficiently.
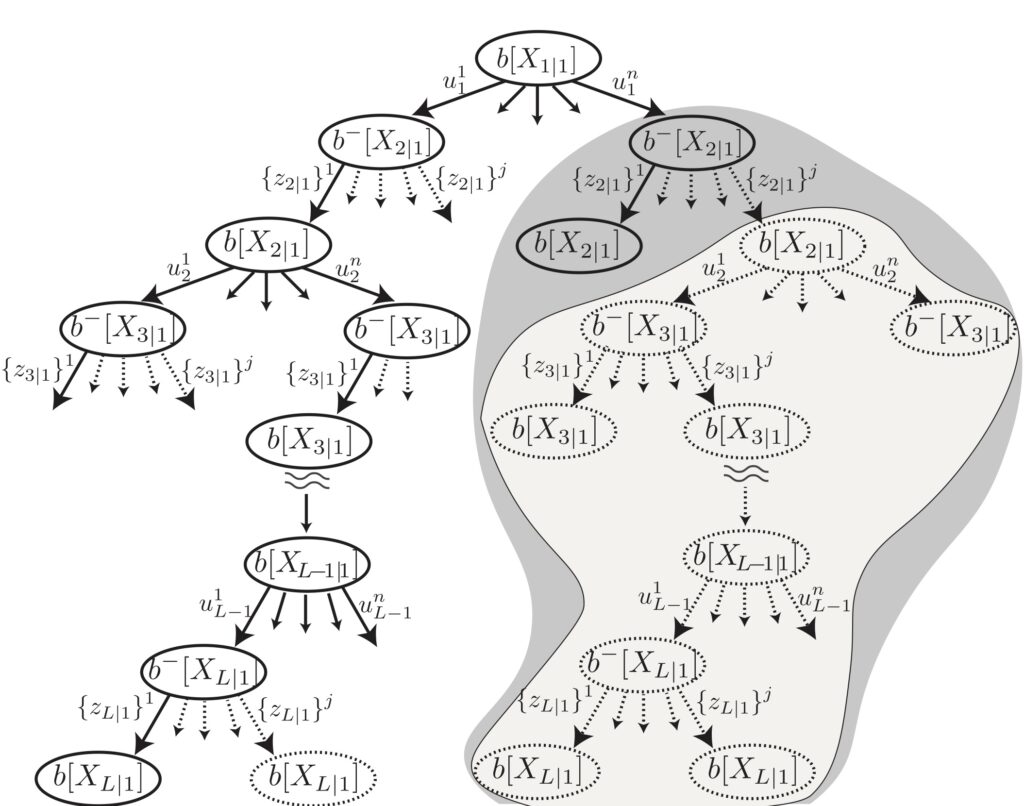
In our recent work on incremental expectation belief space planning (iX-BSP), we contribute an approach that re-uses calculations between different planning sessions. Specifically, iX-BSP incrementally updates the expectation related calculations in full expectation BSP, by re-using the measurements sampled in a precursory planning session, while selectively re-sampling measurements in order to assure adequate representation of the measurement likelihood. Thus, Instead of re-calculating the planning session each time from scratch, we create it by incrementally updating the precursory session with newly received information, using our previous work on efficient belief update.