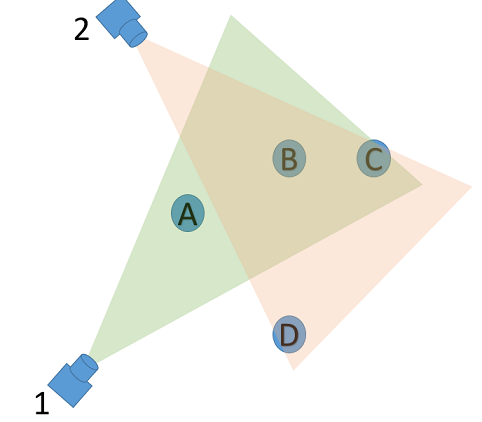
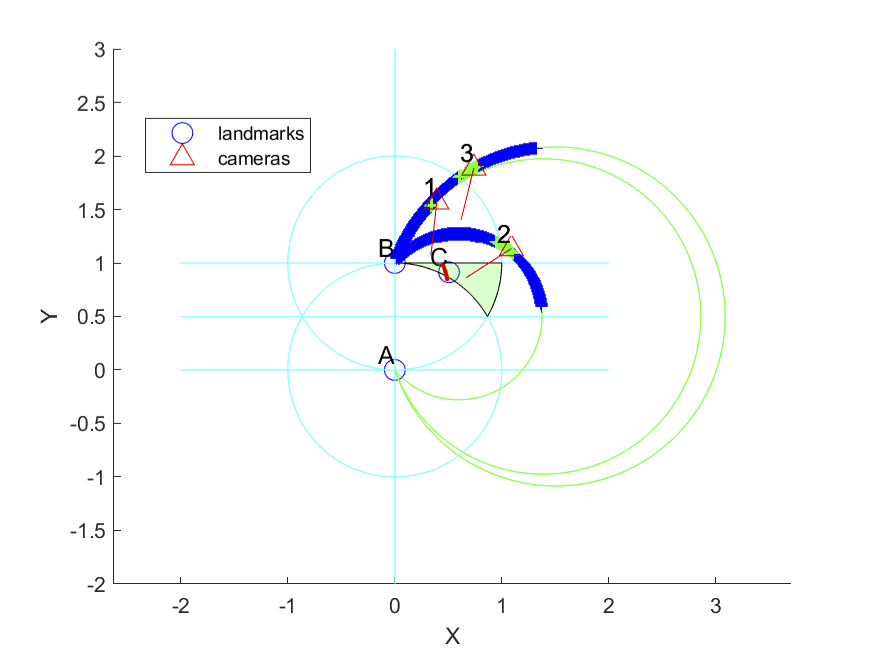
Simultaneous localization and mapping (SLAM) is essential in numerous robotics applications such as autonomous navigation. Traditional SLAM approaches infer the metric state of the robot along with a metric map of the environment. While existing algorithms exhibit good results, they are still sensitive to measurement noise, sensors quality, data association and are still computationally expensive. Alternatively, we note that some navigation and mapping missions can be achieved using only qualitative geometric information, an approach known as qualitative spatial reasoning (QSR). In this research thread, we investigate a novel probabilistic qualitative localization and mapping approach, which extends the state of the art by inferring also the qualitative state of the camera poses (localization), as well as incorporating probabilistic connections between views (in time and in space).
Based on this first work, our ongoing research endeavors focus on further pushing the state of the art to enable online qualitative autonomous navigation and mapping.