Note: this page is currently outdated; contact us for up-to-date information..!
Below we provide code and datasets used in some of the research projects at ANPL. The code is made publicly available under the GPL license. Please do not hesitate to contact us with requests or questions.
- Incremental Light Bundle Adjustment (iLBA)
- Factor Graph based Incremental Smoothing in Navigation Systems
- ANPL aerial visual datasets
Incremental Light Bundle Adjustment (iLBA)
Code
- C implementation of iLBA can be downloaded here
- You will need to install the GTSAM optimization library
- Please first take a look at the README file
Datasets
- A synthetic and real-imagery datasets can be found here (300MB)
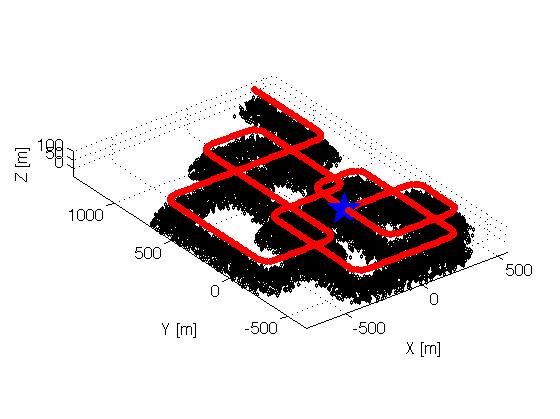
- Synthetic dataset: an aerial scenario with a monocular downward facing camera (450 images, 15000 3D points)
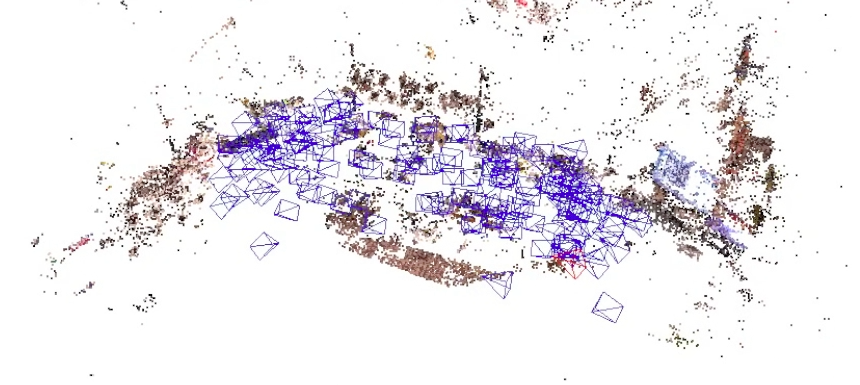
- Real-imagery dataset: a cubicle desk in an open space environment captured from different viewpoints and distances (148 images, 31910 3D points)
- Instructions for running iLBA on these two datasets are provided in README file
Camera trajectory in the synthetic dataset:
Cubicle (real-imagery) dataset: 2 typical images, and estimated camera poses and sparse structure reconstruction using iLBA:


Factor Graph based Incremental Smoothing in Navigation Systems
Related research and publications can be found here.
Code
Implementation of the equivalent and basic inertial navigation factors is now part of the official GTSAM optimization library (starting from version 2.3.0), and can be found here.
ANPL Aerial Visual Tracking Datasets
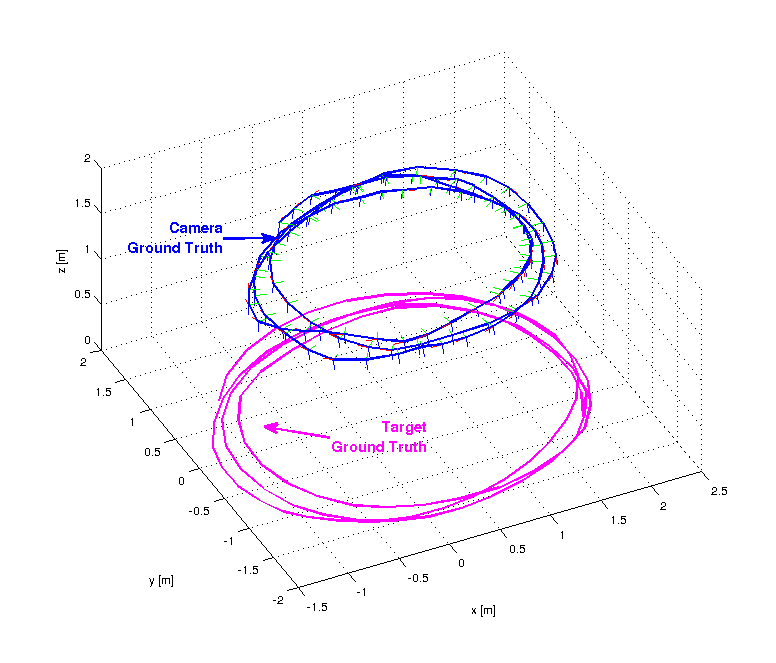
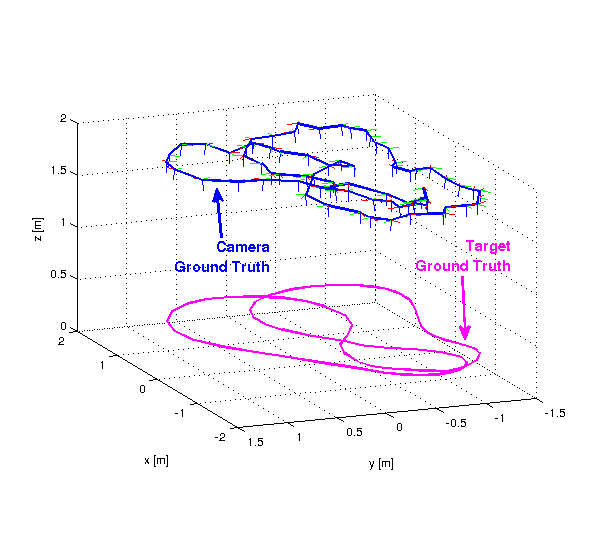
The ANPL Aerial Datasets (ANPL1,2&3) are vision datasets that include a moving camera and a moving target, gathered at the ANPL lab, at the Technion (August 2016). The dataset consists of visual data from a downward pointing GOPRO camera, attached to a mount which was moved horizontally approximately 2 meters above the ground. In ANPL1&2, a dynamic target on which a tennis ball and an Apriltag pattern were attached, moves on the ground and occasionally exits the camera’s field of view. Ground truth for the target and the camera is provided by an independent optical 6DoF tracking system (Optitrack).
This dataset has been released for public use for testing and evaluating of visual SLAM and vision-aided navigation algorithms with combined dynamic target trajectory estimation.
Link to bitbucket repository that hosts ANPL1,2&3 datasets. The repository includes:
- images and the original video sequences
- ground truth data for both the aerial camera and ground target
- camera calibration data
A sample of the ANPL1 visual dataset including camera and target motion is shown in the next video. Note both the camera and the target move.
Ground truth camera and target trajectories are given below.