We propose the conceptual idea of resorting to sparsification and conservative information fusion techniques for information-theoretic decision making, aiming to address challenges involved with decision making over a high-dimensional, possibly highly-correlated, information space. Our key observation is that in certain cases, the impact of any two actions (or controls) on an appropriate utility measure, such as entropy, has the same trend regardless if using the original probability distribution function (pdf) or an appropriately sparsified approximation of thereof. This observation suggests that in these cases, decision making can be performed over a sparsified (possibly conservative) pdf, instead of the original pdf, without sacrificing performance.
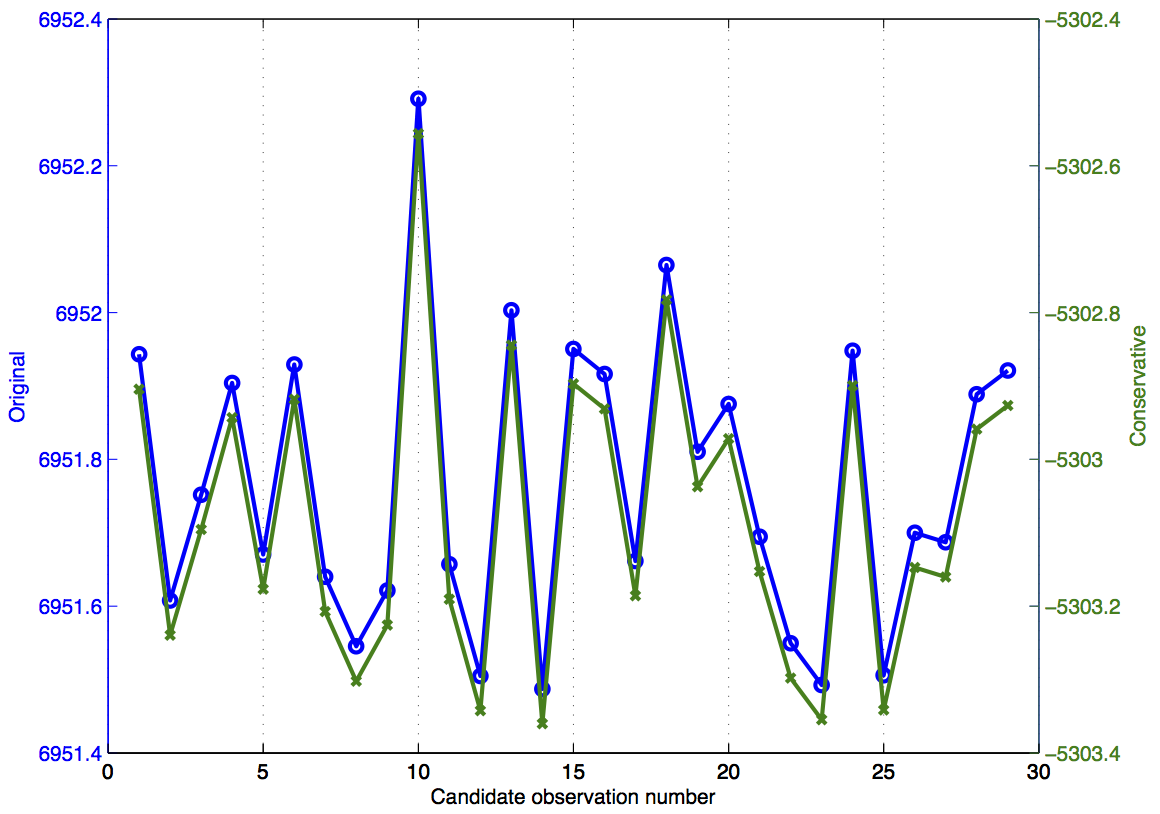
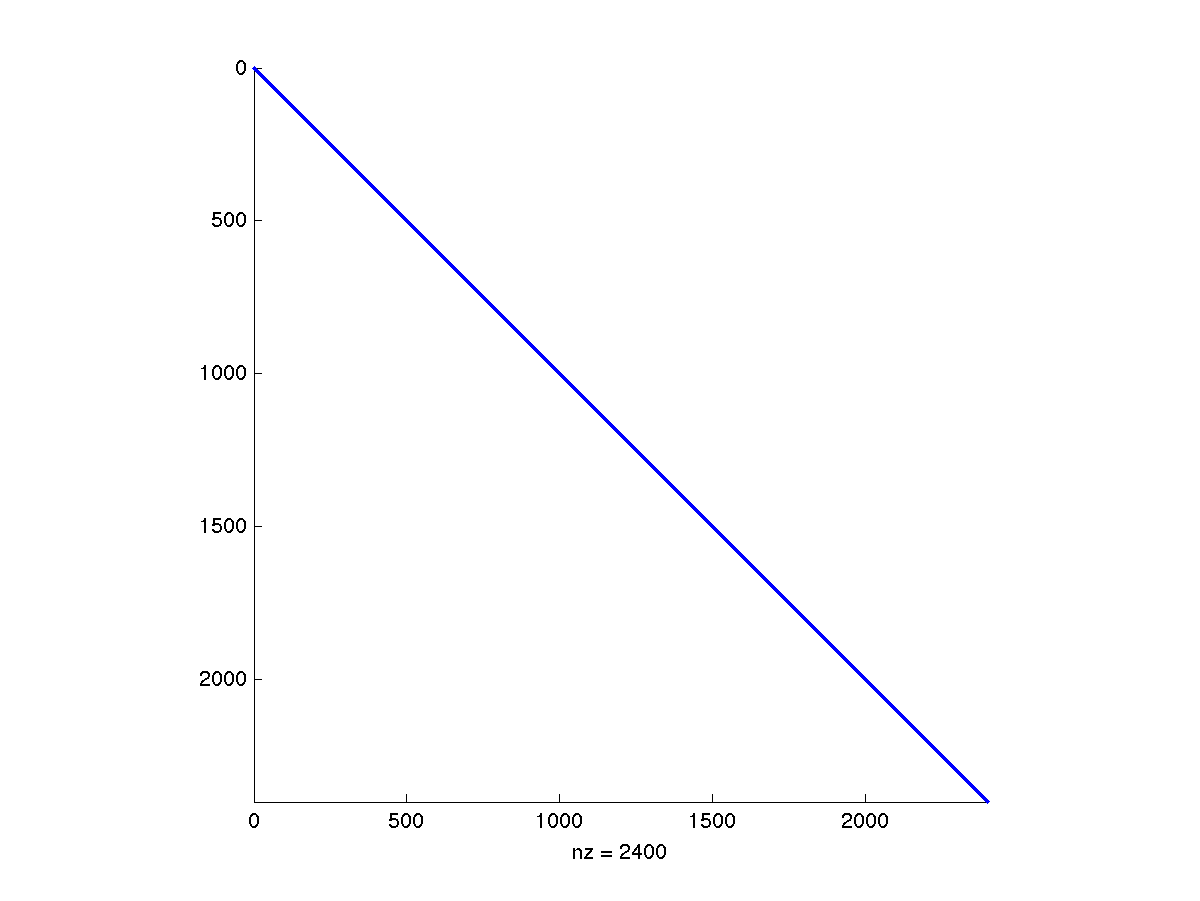
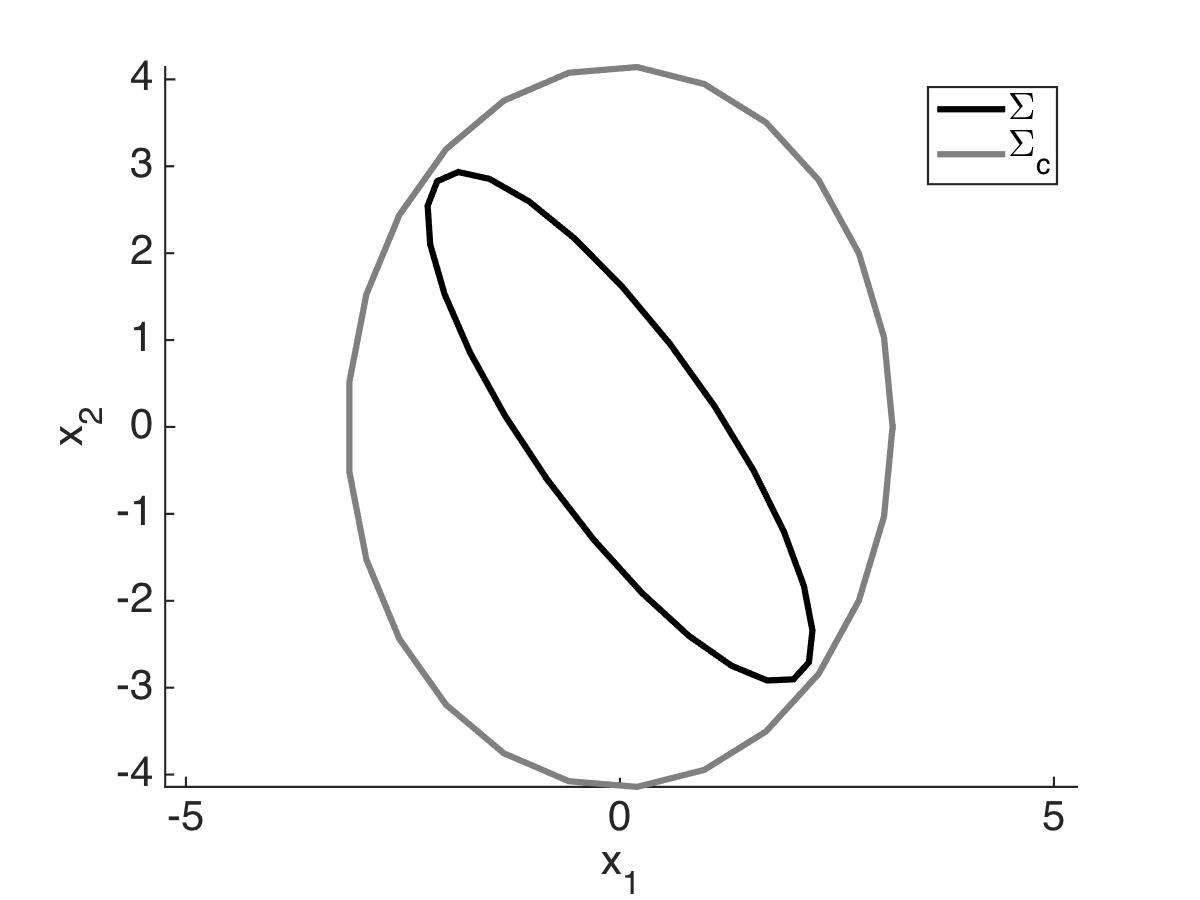
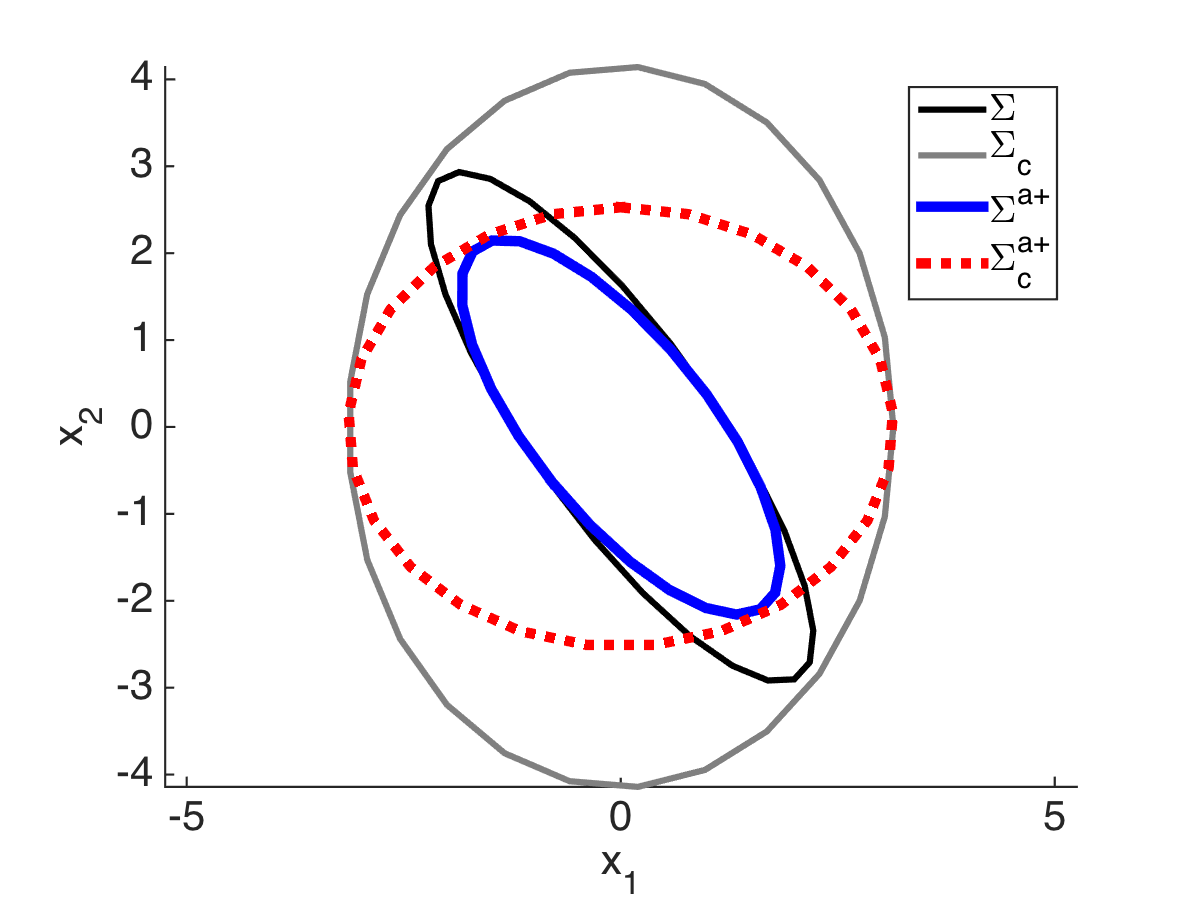
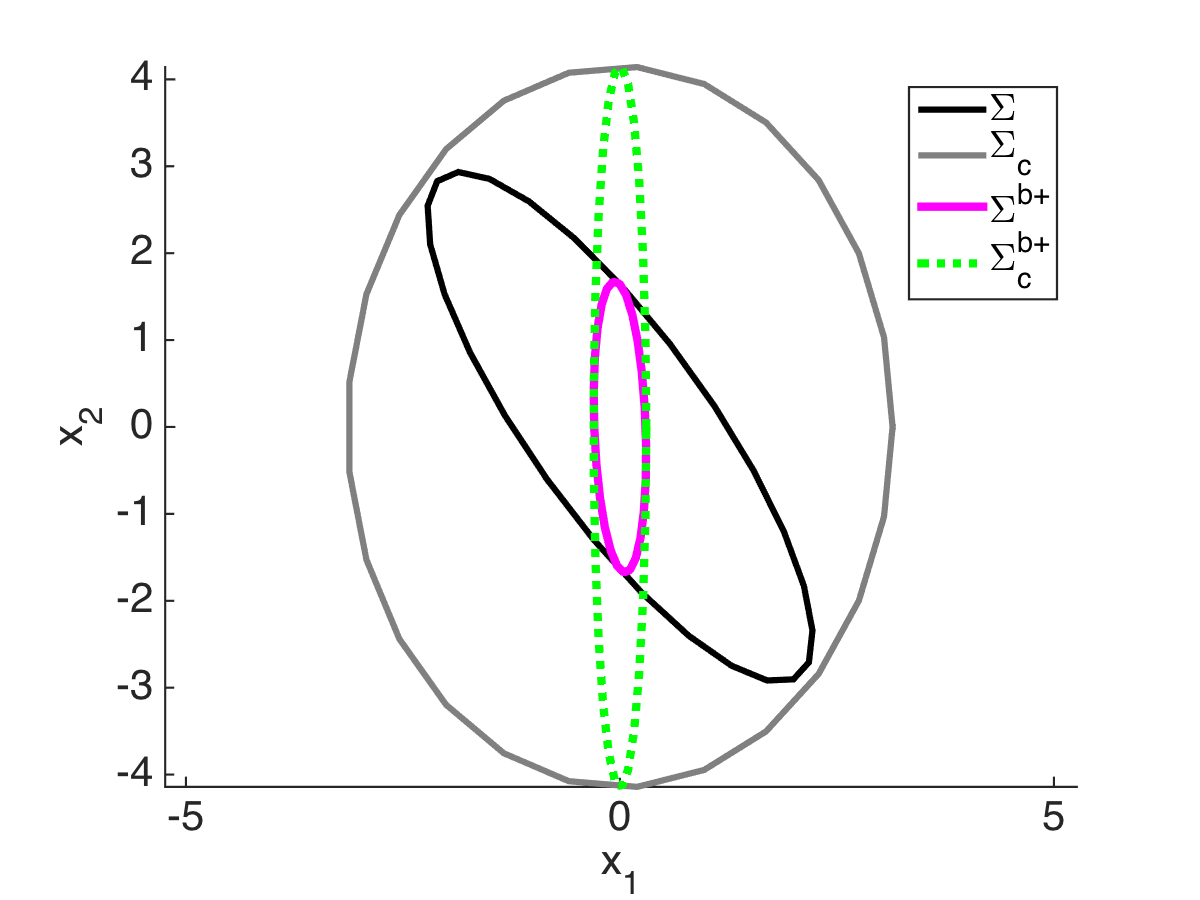
In particular, we consider a specific conservative pdf that decouples the random variables in the joint pdf, admitting extremely efficient entropy computation. The left figure below illustrates this process for a two-dimensional state. The two images on the right show a posteriori covariances for two different actions calculated using the original and conservative a priori covariance matrices.
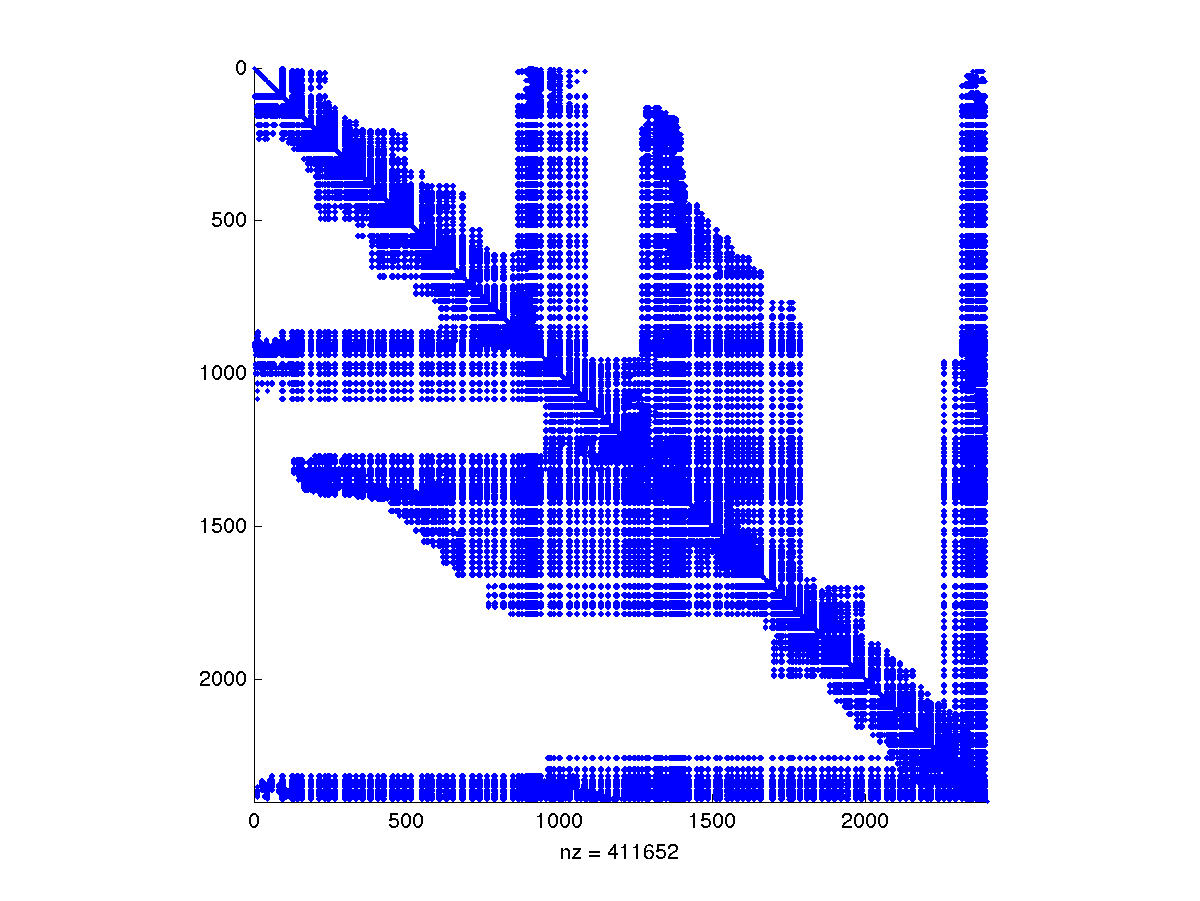
The concept is particularly applicable to decision making in high-dimensional state spaces, e.g. in context of SLAM.